
Mikrofony ciśnieniowe
Mikrofon ciśnieniowy jest zasadniczo membraną umieszczoną przed zamkniętą komorą. Ciśnienie akustyczne może dotrzeć do membrany tylko z jednej strony.
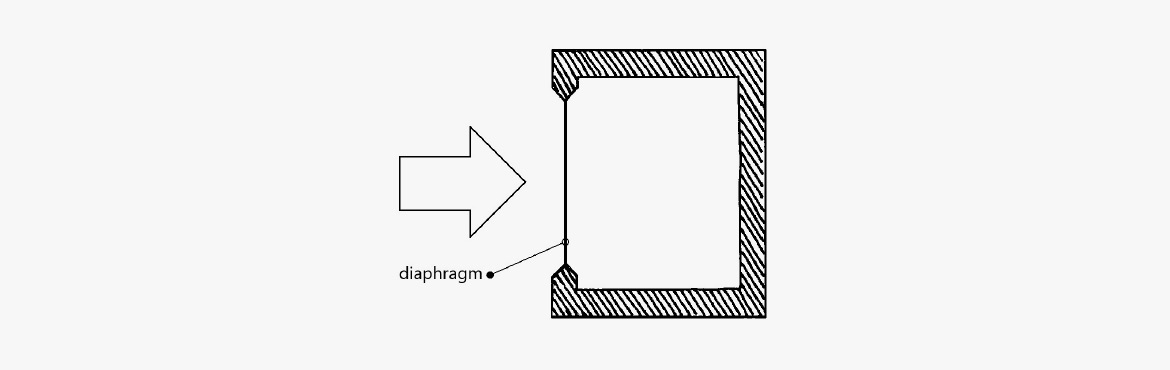
Rysunek 1. Zasada działania mikrofonu ciśnieniowego – membrana przed zamkniętą komorą (bez przetwornika).
Mikrofon ciśnieniowy można porównać do manometru służącego do pomiaru ciśnienia w cieczy, mierzącego je jako wartość skalarną bez kierunku. Nie ma znaczenia, w którą stronę skierowana jest membrana. Ważne jest ciśnienie w rzeczywistej głębokości.
![]()
Rysunek 2. Zasada działania przetwornika ciśnienia.
Podobnie, mikrofon ciśnieniowy będzie wykrywał ciśnienie akustyczne niezależnie od kierunku, z którego dźwięk napływa. Mikrofon ciśnieniowy jest wszechkierunkowy.
Jednakże, fizyczne wymiary mikrofonu wpływają na pole akustyczne, w którym jest umieszczony. Przy wyższych częstotliwościach, o długościach fali porównywalnych lub krótszych niż średnica membrany, dochodzi do wzrostu ciśnienia, gdy dźwięk uderza w osi membrany. Skutkiem tego jest zwiększony poziom na wyjściu mikrofonu.
Z kolei, gdy dźwięk dochodzi od tyłu mikrofonu, występuje efekt zacienienia. Stopień wpływu tych zjawisk zależy od wymiarów mikrofonu. Im większa średnica membrany i wymiary obudowy mikrofonu, tym niżej w zakresie częstotliwościowym będzie wykazywał zwiększoną wrażliwość.
Zatem, jeśli dźwięk może dotrzeć do membrany tylko od przodu, jest to mikrofon ciśnieniowy, a co za tym idzie, o charakterystyce wszechkierunkowej.
Mikrofony ciśnieniowo gradientowe
W mikrofonie ciśnieniowo gradientowym ciśnienie akustyczne może docierać do membrany zarówno od przodu, jak i od tyłu. Napięcie wyjściowe z mikrofonu jest proporcjonalne do gradientu ciśnienia, czyli różnicy ciśnienia między przodem a tyłem membrany. Jeśli dźwięk dociera z boku, takie samo ciśnienie występuje po obu stronach membrany. Wtedy brak jest gradientu i tym samym brak sygnału z mikrofonu.
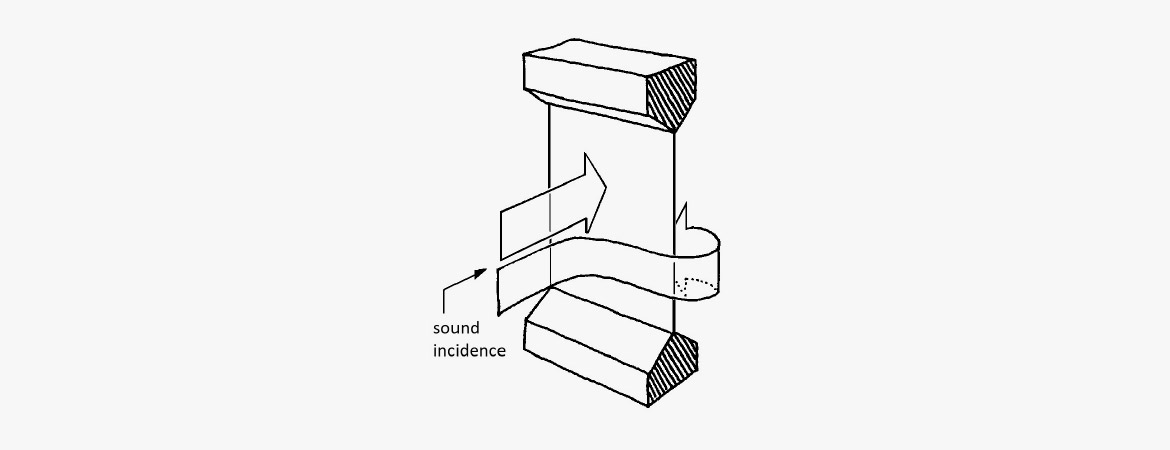
Rysunek 3. Zasada działania mikrofonu ciśnieniowo gradientowego.
Mikrofon ciśnieniowo gradientowy jest dwukierunkowy i wykazuje charakterystykę kierunkową przypominającą cyfrę 8. Podobnie jak w przypadku mikrofonów ciśnieniowych, charakterystyka mikrofonów ciśnieniowo gradientowych ściśle związana jest z polem akustycznym, w którym są umieszczone.
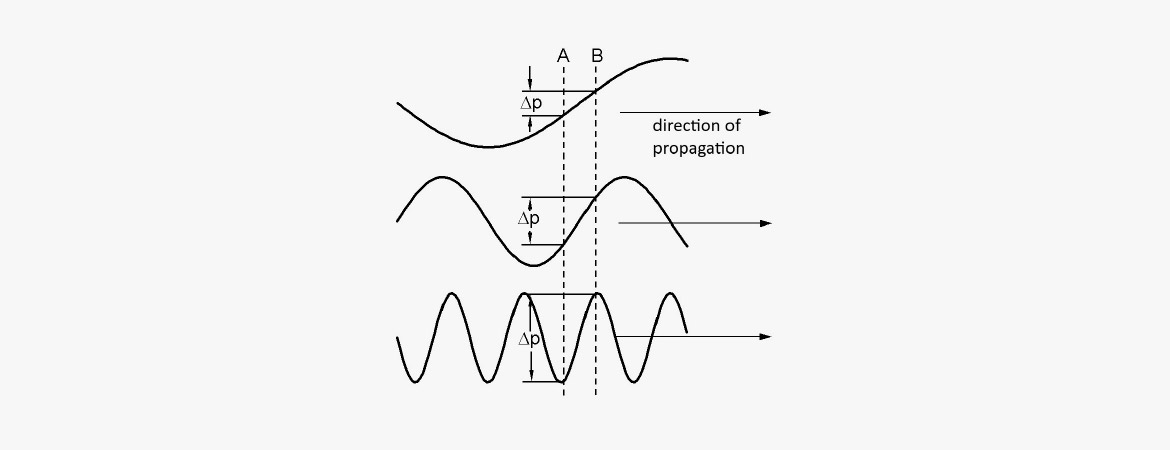
Rysunek 4. Gradient ciśnienia dla różnych długości fali.
Różnica w ciśnieniu dźwięku zależy od długości fali. Niskie tony, czyli częstotliwości o dużej długości fali, dłuższej niż odległość między przodem a tyłem membrany, dają tylko niewielką różnicę ciśnienia. Wraz ze wzrostem częstotliwości gradient się zwiększa, a wraz z tym ruch membrany wzrasta. Maksymalny ruch membrany osiąga się przy częstotliwości, w której połowa długości fali jest równa odległości między przodem a tyłem membrany.
Rysunek 5. Gradient ciśnienia między dwoma punktami fali dźwiękowej.
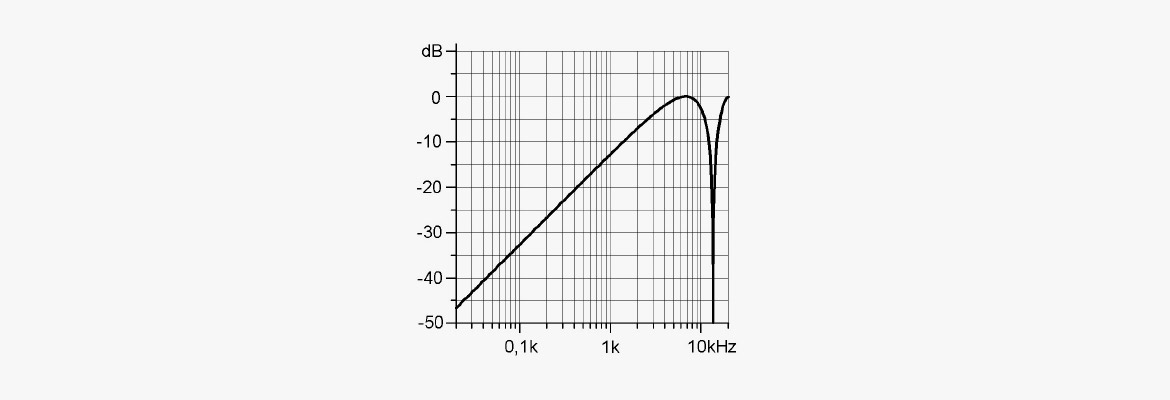
W przypadku mikrofonów o standardowych rozmiarach, to zjawisko występuje przy około 5-10 kHz. Przy krótszych długościach fali warunki stają się bardziej skomplikowane, a charakterystyka przypominająca cyfrę 8 musi być wspierana przez konstrukcje mechaniczne, które zapewniają efekty zacienienia lub interferencji.
„Surowa” charakterystyka częstotliwościowa mikrofonu ciśnieniowo gradientowego pozbawiona jest niskich tonów. Nachylenie krzywej wynosi +6 dB/oktawa. Aby mikrofon wykazywał odpowiednią charakterystykę częstotliwościową w niskich częstotliwościach, w projektowaniu stosuje się różne techniki w celu uzyskania płaskiej charakterystyki częstotliwościowej. Jednym z podejść jest zmniejszenie sztywności membrany, co prowadzi do niskiego rezonansu (podobnie jak strojenie bębna). W zależności od projektu i potrzeby występuje spadek, który wynosi 12 dB/oktawa poniżej rezonansu. Wszystkie mikrofony ciśnieniowo gradientowe w pewnym momencie wykazują spadek przy niskich częstotliwościach.
W mikrofonach ciśnieniowo gradientowych występuje również inny czynnik. Jeśli źródło dźwięku jest umieszczone blisko mikrofonu, następuje wzrost niskich tonów. To zjawisko nazywane jest efektem zbliżeniowym. Efekt ten wynika z odwrotności kwadratu (prawo utraty 6dB przy podwajaniu odległości od źródła punktowego). Ten efekt pojawia się przy krótkich odległościach.
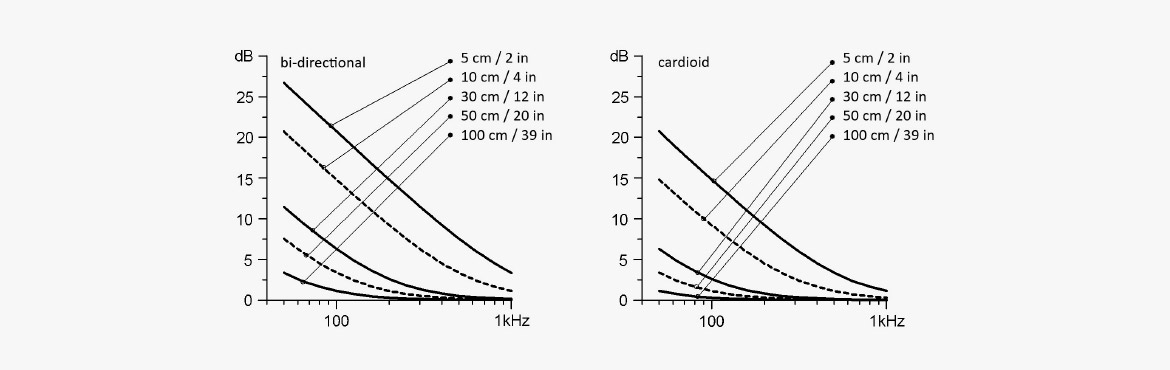
Rysunek 6. Efekt zbliżeniowy. Wzrost niskich tonów w zależności od odległości od źródła dźwięku, mikrofony o charakterystyce dwukierunkowej i kardioidalnej.
Jeśli na przykład źródło punktowe jest umieszczone 2 cm od membrany, a odległość od przodu do tyłu membrany również wynosi 2 cm, różnica ciśnienia wynosi 6dB. Ta zasada obowiązuje w całym zakresie częstotliwości. Jednak, ponieważ gradient ciśnienia jest niski przy niskich częstotliwościach, efekt dodatkowej różnicy ciśnienia prowadzi do zwiększenia poziomu wyjścia w niskich częstotliwościach. Innymi słowy: Gdy źródło dźwięku zbliża się do mikrofonu, dźwięk staje się bardziej basowy.
Mikrofony ciśnieniowe i gradientowe
Jeśli połączysz zasady ciśnienia i gradientu ciśnienia, uzyskasz mikrofon kierunkowy – obejmujący charakterystyki szeroko kardioidalne (subkardioidalne), kardioidalne, superkardioidalne i hiperkardioidalne. Sprzężenie tych dwóch zasad może mieć miejsce zarówno w sposób mechaniczno-akustyczny, jak i elektryczny.
Za pomocą mechanicznego sprzężenia akustycznego, część dźwięku wpływającego na tył membrany jest przepuszczana przez jeden lub więcej otworów w obudowie mikrofonu. Poprzez zmianę rozmiaru i tłumienia tych otworów, możliwe jest kontrolowanie charakterystyk od wszechkierunkowej (obudowa mikrofonu w pełni zamknięta) do dwukierunkowej (dźwięk może dotrzeć zarówno do przodu, jak i do tyłu membrany). Ta forma sprzężenia może być stosowana zarówno w mikrofonach dynamicznych, jak i kondensatorowych.
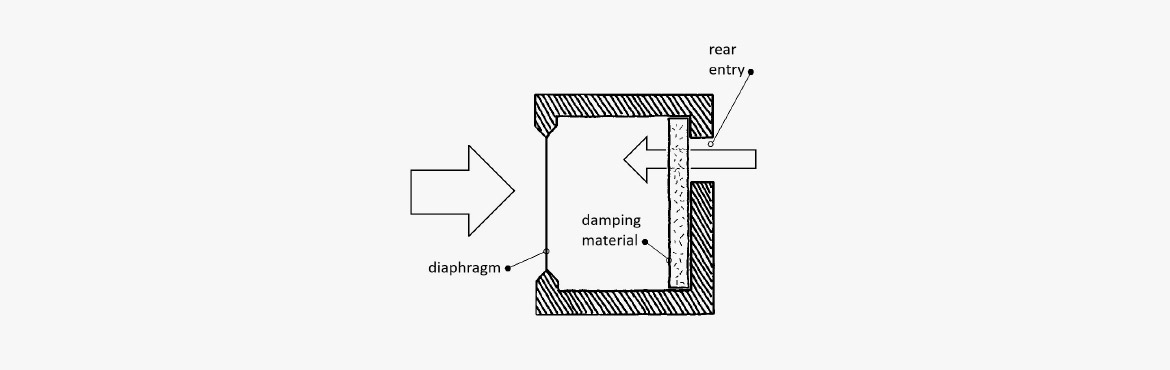
Rysunek 7. Ta obudowa mikrofonu umożliwia dźwiękowi dostanie się przez tylne otwarcie, tworząc gradient ciśnienia.
Poprzez częściowe zamknięcie tyłu membrany, otwór jest pokrywany porowatym lub perforowanym materiałem tłumiącym, dzięki czemu dźwięk może przechodzić zredukowaną prędkością. Ta technika zapewnia, że dźwięk napływający od tyłu (180° w kierunku osi) dociera jednocześnie do przodu i tyłu membrany. Powoduje to brak ruchu membrany, a mikrofon zachowuje się tak, jakby był niewrażliwy na dźwięk z tyłu. Przy innych kierunkach dźwięku (¹≠180°), membrana będzie miała zwiększoną czułość. Ten mikrofon ma charakterystykę kardioidalną.

Rysunek 8. Przykład mikrofonu łączącego ciśnienie i gradient ciśnienia.
Poprzez zmianę tłumienia dostępu dźwięku do tyłu membrany w pewnym stopniu, mikrofon staje się niewrażliwy na dźwięk padający pod kątem 120° od osi. Jest to konstrukcja mikrofonu superkardioidalnego, który jest nieco bardziej wrażliwy na dźwięk napływający bezpośrednio od tyłu.
Elektryczne sprzężenie między zasadami ciśnienia i gradientu ciśnienia jest zazwyczaj stosowane tylko w mikrofonach kondensatorowych. Ten rodzaj sprzężenia jest łatwy do zmiany i zostanie opisany w sekcji dotyczącej mikrofonów kondensatorowych.
Mikrofon w polu dźwiękowym
Ze względu na obecność mikrofonu w polu dźwiękowym, przy wysokich częstotliwościach będzie on miał zakłócający wpływ na pole. Wystąpi częściowe ugięcie dźwięku wokół mikrofonu – dyfrakcja – oraz częściowe odbicie od przodu membrany, co spowoduje wzrost ciśnienia.
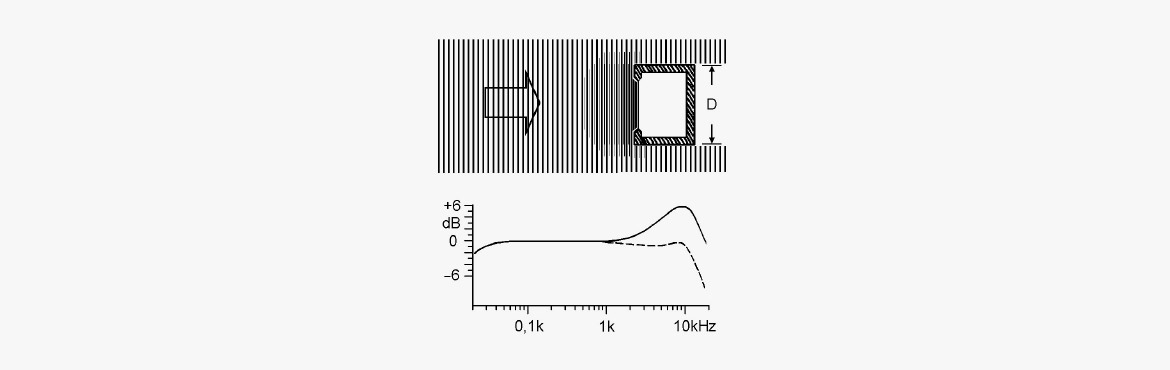
Rysunek 9. Gromadzenie się ciśnienia przy długościach fali równej i krótszej niż średnica.
Na mikrofony ciśnieniowe największy wpływ mają ich wymiary fizyczne. Ich charakterystyka sferyczna zmienia się przy wzrastającej częstotliwości na węższą. Jednocześnie dochodzi do nagromadzenia ciśnienia, dlatego charakterystyka częstotliwościowa pokaże wzrost o kilka dB w kierunku osi przy wysokich częstotliwościach.
Podstawowy projekt mikrofonów ciśnieniowych często wykazuje spadek przy wyższych częstotliwościach. Dodając siatkę przed membraną, powstaje rezonans, który podnosi wyższe częstotliwości, aby uzyskać płaską charakterystykę pola swobodnego lub potrzebną płaską charakterystykę pola dyfuzyjnego.
Można również stosować różne akcesoria, takie jak korektory ciśnienia akustycznego (APE). Te urządzenia zwiększają dodatkowo pasmo przenoszenia i kierunkowość.
Mikrofon z gradientem ciśnienia o charakterystyce ósemkowej może być skonstruowany bez problemów z dyfrakcją do częstotliwości odcięcia. Powyżej częstotliwości odcięcia, dyfrakcja i wzrost ciśnienia mogą częściowo skorygować malejącą charakterystykę częstotliwości.
Podczas rejestracji dźwięku w pomieszczeniach, z odległości (np. 1-2 m) od źródła dźwięku, na odbierany dźwięk, oprócz bezpośredniego pola dźwiękowego, znacząco wpływa pole rozproszone.
Typowym celem projektowym dla mikrofonów z gradientem ciśnienia jest osiągnięcie jak największej równoległości częstotliwościowej dla charakterystyki pola swobodnego i charakterystyki pola dyfuzyjnego. Pozwala to na zmianę „efektu przestrzennego”, tj. stosunku bezpośredniego dźwięku i dźwięku odbitego, w nagraniu, bez zmiany balansu częstotliwości mikrofonu.
W przypadku mikrofonów ciśnieniowych należy wybrać płaską charakterystykę pola swobodnego lub płaską charakterystykę pola rozproszonego. Można to zrobić, wybierając między różnymi siatkami przednimi mikrofonu.
Mikrofon z tubą interferencyjną
Mikrofon z tubą interferencyjną jest szczególnie przydatny, gdy potrzebna jest skoncentrowana kierunkowość. Często określa się je jako „pistoletowy” (gun) lub „długa strzelba” (shotgun). Mikrofon z tubą interferencyjną może mieć postać kilku równoległych rurek o różnych długościach, ustawionych prostopadle do mikrofonu. Najczęściej jednak spotykana jest pojedyncza, siatowa tuba, zabezpieczona sztywną obudową z podłużnymi otworami.
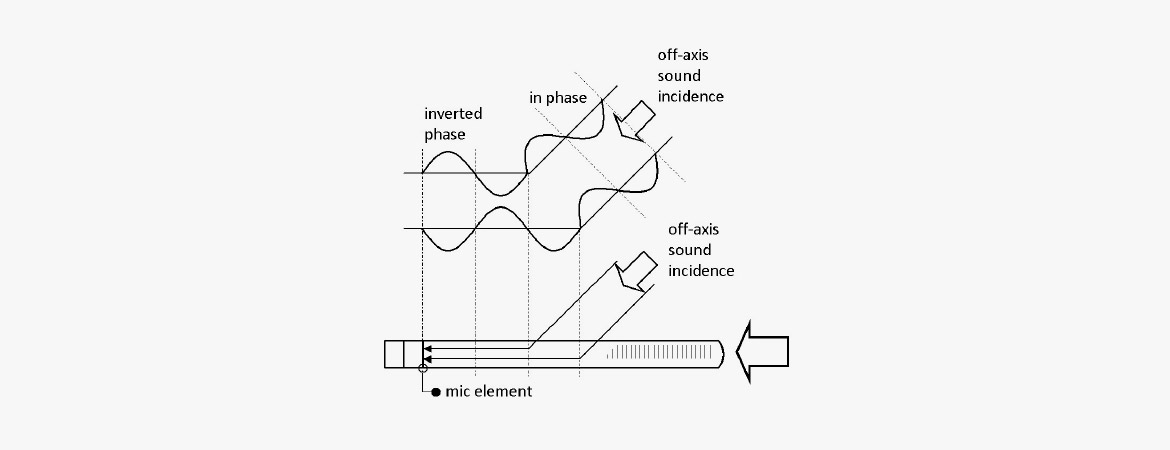
Rysunek 10. Mikrofon z tubą interferencyjną.
Wspólna dla obu projektów jest zasada działania: Gdy dźwięk uderza w mikrofon bezpośrednio na osi, poszczególne części fali dźwiękowej pokonują równą odległość. Dzięki temu docierają do elementu czułego na ciśnienie jednocześnie i pozostają w fazie.
Jeśli dźwięk uderza w mikrofon z innych kątów, poszczególne części fali dźwiękowej będą podróżować różnymi ścieżkami, aby dotrzeć do elementu wrażliwego na ciśnienie. Poszczególne składniki ciśnienia nie mogą mieć więc tej samej fazy i po dodaniu się będą tworzyć ciśnienie dźwięku znacznie mniejsze niż to, które powstało w wyniku bezpośredniego uderzenia dźwięku.
Fazowanie dźwięku padającego z boku będzie zależeć od długości fali dźwiękowej i kąta, pod jakim dźwięk pada.
Ponieważ nowoczesny mikrofon interferencyjny jest zaprojektowany jako długa tuba ze szczelinami na całej długości tuby, zapewnia on bardziej równomierne tłumienie dźwięku docierającego z boku niż może to zapewnić ograniczona liczba tub. Należy jednak wykonać tłumienie akustyczne fal dźwiękowych, które padają najbliżej elementu czułego na nacisk. Dlatego nie jest to tylko kwestia wykonania szczelinowej rurki, ale także kwestia odpowiedniego tłumienia w rurce.
Ponieważ interferencja w tubie będzie miała miejsce dopiero dla długości tuby większej niż połowa długości fali, wysoki efekt kierunkowy można uzyskać tylko w górnej części zakresu częstotliwości. Dlatego mikrofon (bez tuby) jest często mikrofonem kardioidalnym, aby uzyskać efekt kierunkowy przy niskich częstotliwościach.
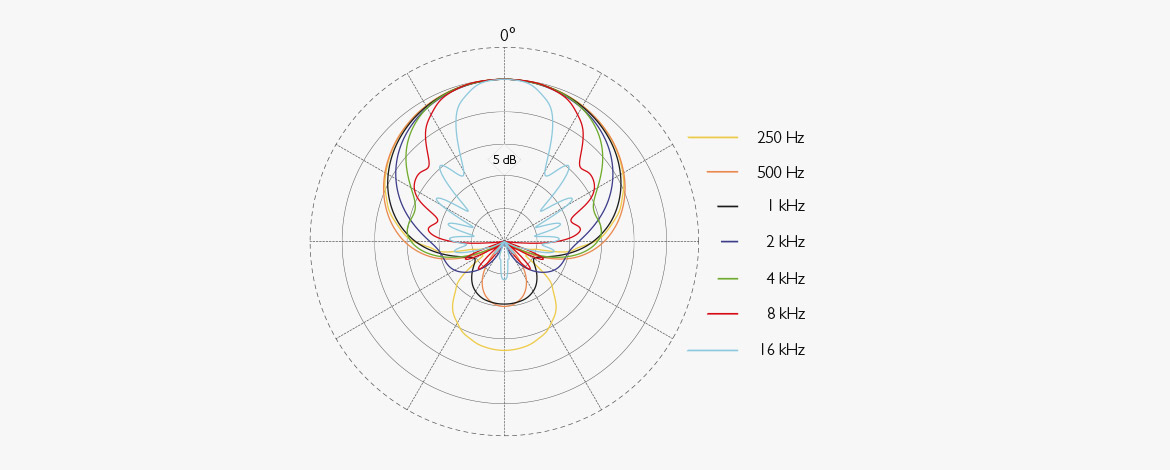
Rysunek 11. Charakterystyka kierunkowa mikrofonu z tubą interferencyjną.
Mikrofon z tubą interferencyjną jest przede wszystkim wrażliwy w jednym kierunku; jednak posiada liczne boczne listki. W wielu przypadkach charakterystyka częstotliwościowa poza miał znacznie mniej przyjemną barwę.
Ekran paraboliczny
Możliwe jest uzyskanie zwiększonego efektu kierunkowego mikrofonu, umieszczając go w ognisku na ekranie parabolicznym. Jest to zasada wykorzystywana głównie przez osoby zajmujące się nagrywaniem śpiewu ptaków. Jednak również transmisje sportowe korzystają z tego ekranu.
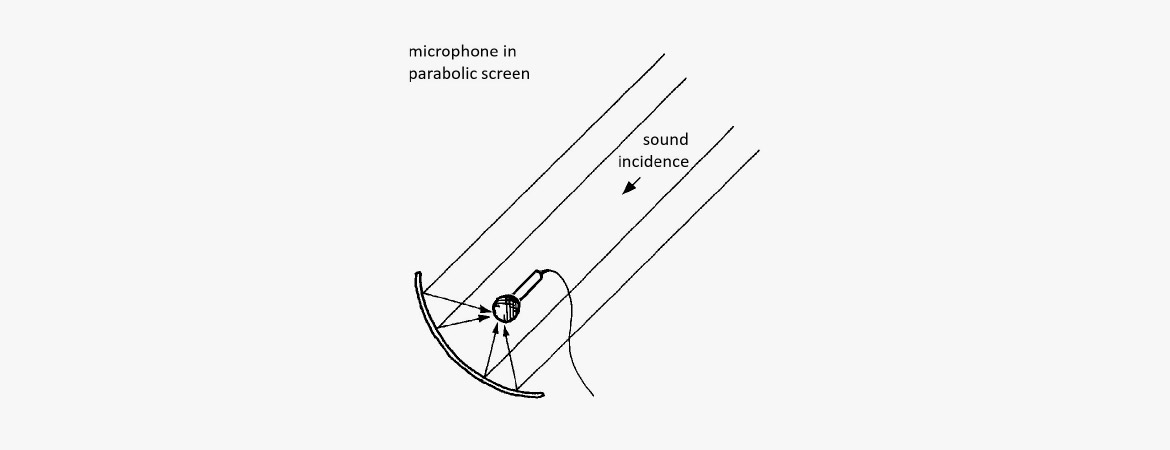
Rysunek 12. Mikrofon w ognisku ekranu parabolicznego.
Ponieważ ekran paraboliczny nie może być zbyt duży ze względów obsługowych, implikuje to również dolny limit częstotliwości, które mogą być odbijane i tym samym wzmocnione. W praktyce granica ta mieści się gdzieś między 500 a 1000 Hz. Poniżej tej częstotliwości mikrofon będzie zachowywał się, jakby nie było ekranu.
Mikrofon powierzchniowy
Mikrofon powierzchniowy (BLM) jest w zasadzie zwykłym mikrofonem, który jest wykorzystywany akustycznie w szczególny sposób.
Jak nazwa wskazuje, ten mikrofon jest umieszczany bezpośrednio na powierzchni ?
Jeśli dźwięk uderza w twardą powierzchnię, jest odbijany. Dlatego w bardzo bliskiej odległości od ciała odbijającego występuje gromadzenie się ciśnienia, które może być rejestrowane przez mikrofon jako wzrost ciśnienia. Dlatego ciśnienie na powierzchni jest o 6 dB silniejsze, niż by było bez powierzchni odbijającej. Ponadto dźwięk rozproszony jest wzmacniany tylko o 3 dB.
Poprzez umieszczenie mikrofonu bezpośrednio na powierzchni odbijającej, uzyskuje się sygnał głośniejszy o 6 dB. Możliwość mikrofonu do rejestrowania dźwięku z odległych źródeł wynika z poprawy stosunku pola swobodnego do pola rozproszonego o 3 dB.

Rysunek 13a. Mikrofony powierzchniowe
Zasadniczo mikrofon powierzchniowy jest typu ciśnieniowego. Możliwe jest jednak również użycie mikrofonu kierunkowego, jeśli jest on umieszczony bardzo blisko powierzchni odbijającej.
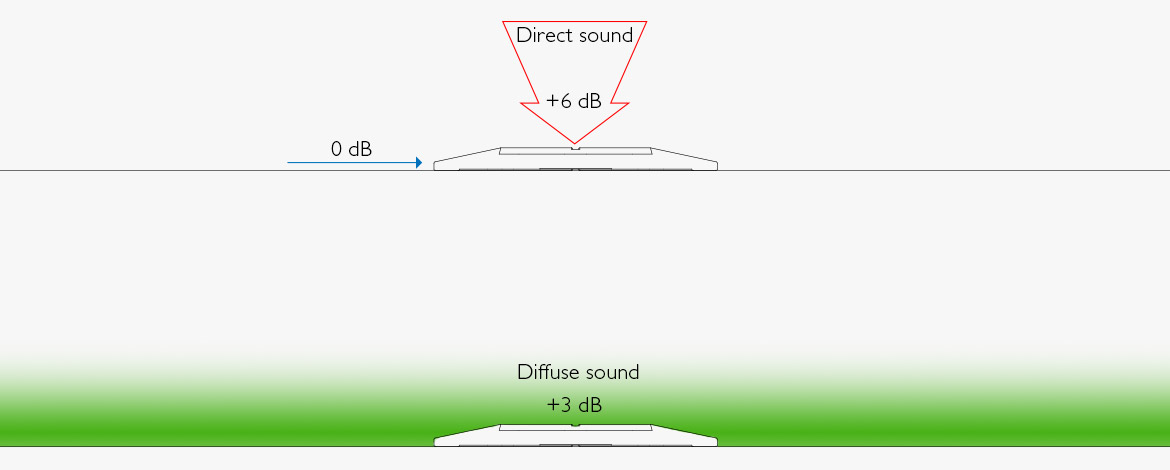
Rysunek 13b. Pole dźwięku bezpośredniego i rozproszonego w mikrofonie powierzchniowym.
Przetwarzanie sygnału
Kiedy wymagane są specjalne właściwości, na przykład dotyczące charakterystyki kierunkowej, można zastosować przetwarzanie cyfrowe sygnału.
Przykładem tego jest KEM (Kardioid – Ebenen – Mikrofon), który został opracowany przez Institut für Rundfunktechnik. Mikrofon działa jako odwrócony głośnik kolumnowy. Szereg mikrofonów dostarcza sygnał, a suma/filtrowanie w procesie cyfrowym daje charakterystykę kierunkową, która można by prawie nazwać „płaską jak naleśnik”.
Rysunek 14. Mikrofon KEM (Kardioid Ebenen Mikrofon) firmy Microtech Gefell.
Tworzenie wiązki uzyskuje się poprzez przetwarzanie sygnałów z wielu elementów umieszczonych jeden za drugim lub na większej powierzchni (np. mikrofony sufitowe, o wymiarach 600 x 600 m).
Mikrofony dynamiczne
Mikrofony dynamiczne działają na zasadzie indukcji. Przewodnik elektryczny porusza się pod wpływem dźwięku w polu magnetycznym. To indukuje napięcie elektryczne na końcach przewodnika, które jest proporcjonalne do prędkości przewodnika w polu dźwiękowym. Sygnał wyjściowy jest więc przesunięty o 90° w fazie w stosunku do ciśnienia dźwięku na membranie.
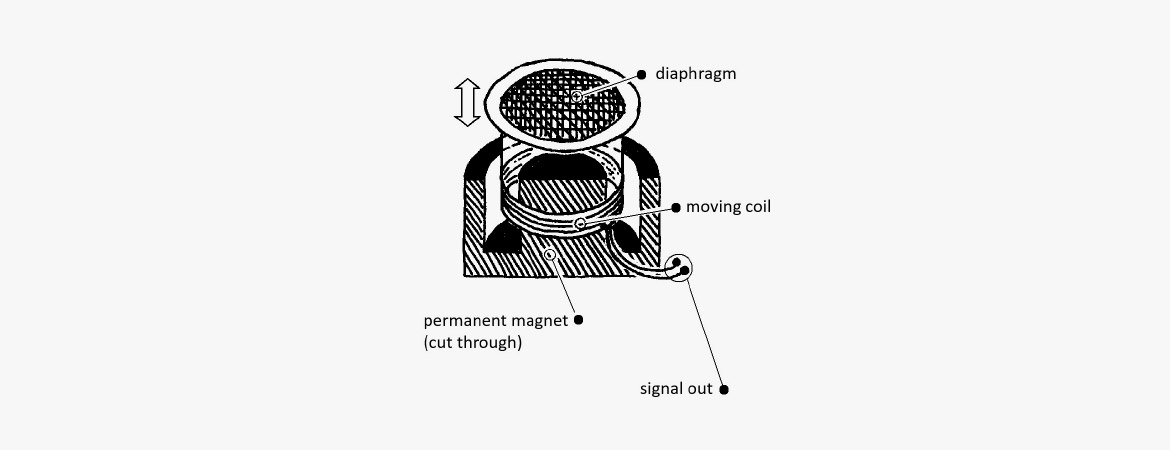
Rysunek 15. Zasada działania mikrofonów z cewką ruchomą.
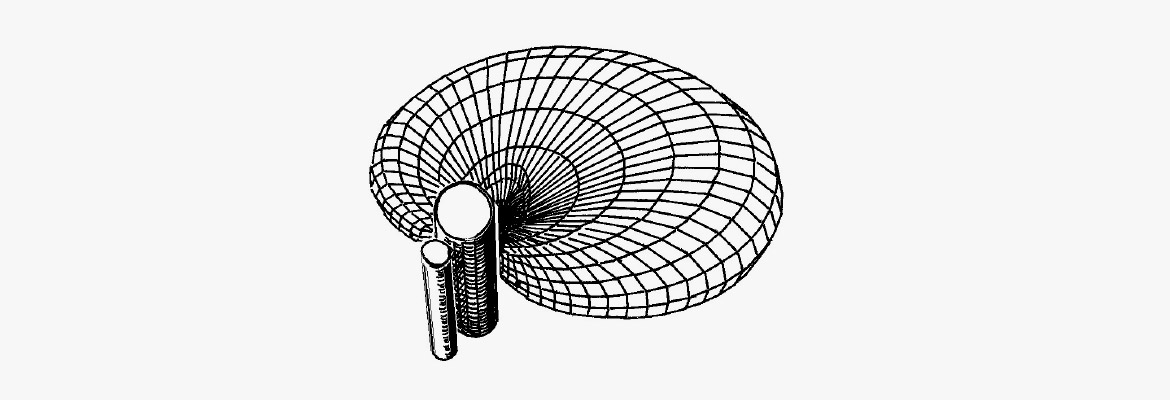
Mikrofony z cewką ruchomą
W mikrofonach z cewką ruchomą przewodnik jest zaprojektowany jako mała cewka przymocowana do membrany z tworzywa sztucznego lub metalu. Cewka jest umieszczona w szczelinie powietrznej silnego, okrągłego magnesu trwałego. Konstrukcja ta jest bardzo podobna do elektrodynamicznego głośnika.
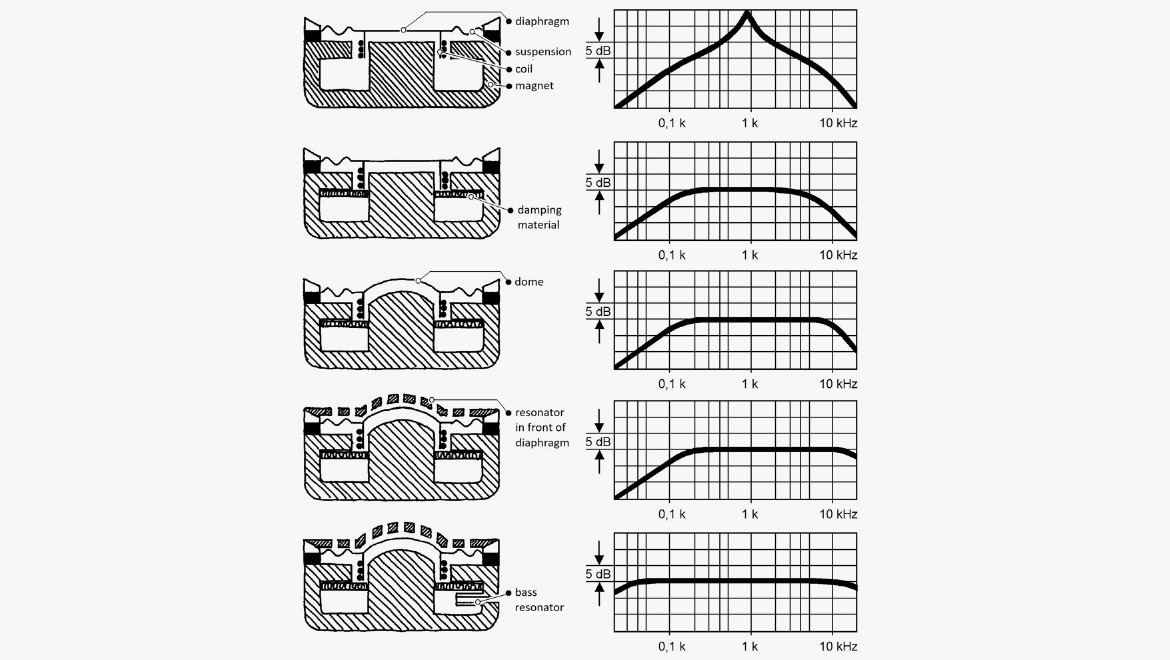
Rysunek 16. Kontrola zjawiska rezonansu w mikrofonach dynamicznych z cewką głosową
Mikrofon w układzie elektrodynamicznym można by porównać do układu masa/sprężyna. Masa tworzona jest przez membranę i cewka głosowa, podczas gdy zawieszenie działa jak sprężyna. Podobnie jak w układzie mechanicznym, mikrofon będzie miał również częstotliwość rezonansową. Dla mikrofonów z cewką drgającą rezonans ten występuje pomiędzy około 150 a 800 Hz, czyli właśnie w środku zakresu częstotliwości użytecznych. Konieczne jest tłumienie membrany, aby osiągnąć względnie płaską charakterystykę częstotliwościową. Zazwyczaj jest to osiągane poprzez umieszczenie materiału tłumiącego.
Na przestrzeni lat producenci mikrofonów musieli eksperymentować z odpowiednimi projektami mechanicznymi, aby osiągnąć szeroki zakres częstotliwości. Dodając materiały tłumiące, komory, przewody itp., osiągnięto zadowalające wyniki. Niemniej jednak mikrofon z cewką ruchomą prawie zawsze doda coś do dźwięku z powodu zjawisk rezonansowych. Jest to jeden z powodów, dlaczego mikrofony mogą brzmieć tak różnie.
Mikrofony wstęgowe
W mikrofonie wstęgowym pole dźwiękowe działa bezpośrednio na przewodnik, zazwyczaj zaprojektowany jako cienka metalowa taśma. Taśma jest zawieszona między biegunami na silnym magnesie stałym.
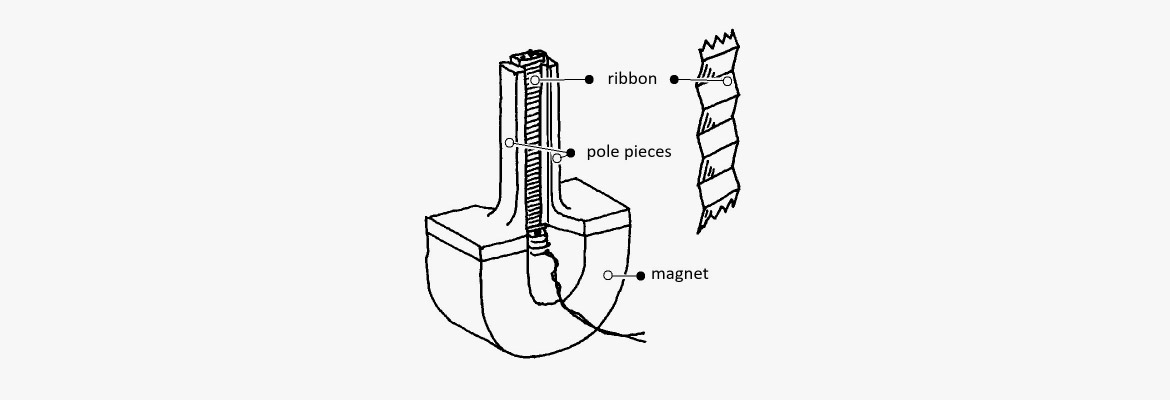
Rysunek 17. Mikrofon wstęgowy.
Gdy wstęga się porusza, na jej końcach generowane jest napięcie. Zarówno napięcie, jak i impedancja są bardzo niskie, więc wstęga jest podłączona do transformatora wbudowanego w sam mikrofon.
Masa wstążki jest niewielka, często mniejsza niż 0,5 mg. Zawieszenie jest niewiarygodnie miękkie, przez co system rezonuje w zakresie 20-70 Hz. Dlatego też, podobnie jak w przypadku mikrofonów z ruchomą cewką, to nie tłumienie określa pasmo przenoszenia, ale masa.
Jeśli dźwięk dociera do obu stron taśmy, mamy do czynienia z czystym mikrofonem ciśnieniowo gradientowym o charakterystyce ósemkowej. Polaryzacja dwóch płatów jest przeciwna.
Mikrofony wstęgowe mogą również łączyć się akustycznie, uzyskując inne charakterystyki kierunkowe.
Mikrofony wstęgowe są ogólnie dość wrażliwe na wpływ mechaniczny i działanie wiatru ze względu na luźno zawieszoną taśmę. W zamian mają stosunkowo dobrą reprodukcję transientów.
Mikrofony kondensatorowe (pojemnościowe)
Mikrofony kondensatorowe niskiej czułości (LF)
Mikrofon kondensatorowy LF składa się z przewodzącej elektrycznie membrany rozwieszonej przed stałą elektrodą. Podając na membranę i tylną elektrodę napięcie polaryzujące, tworzone jest pole elektryczne między tymi dwoma częściami, podobnie jak w płytach kondensatora. Pole to napina membranę.
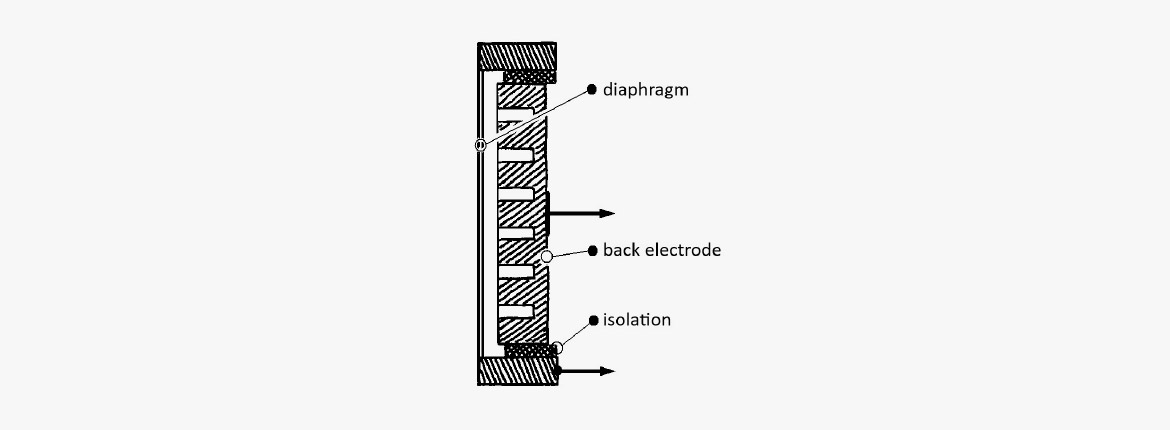
Rysunek 18. Zasada działania mikrofonu kondensatorowego.
Pod wpływem dźwięku odległość między membraną a elektrodą stałą będzie się zmieniać. Innymi słowy, pojemność będzie się zmieniać wraz z polem dźwiękowym. Ponieważ ładunek poprzez napięcie polaryzujące jest utrzymywany na stałym poziomie, napięcie chwilowe mikrofonu kondensatorowego jest proporcjonalne do przemieszczenia membrany od pozycji neutralnej.
Membrana może składać się z cienkiej folii metalowej, np. niklu, o grubości 2-3 µm. Współczesne mikrofony kondensatorowe mają membrany z folii plastikowej z naniesioną warstwą metalu, np. złota. Te materiały posiadają niewielką masą; jednak może być konieczne podparcie większych membran w ich środku, aby membrana i elektroda stała nie ugięły się i nie spowodowały zwarcia statycznego napięcia.
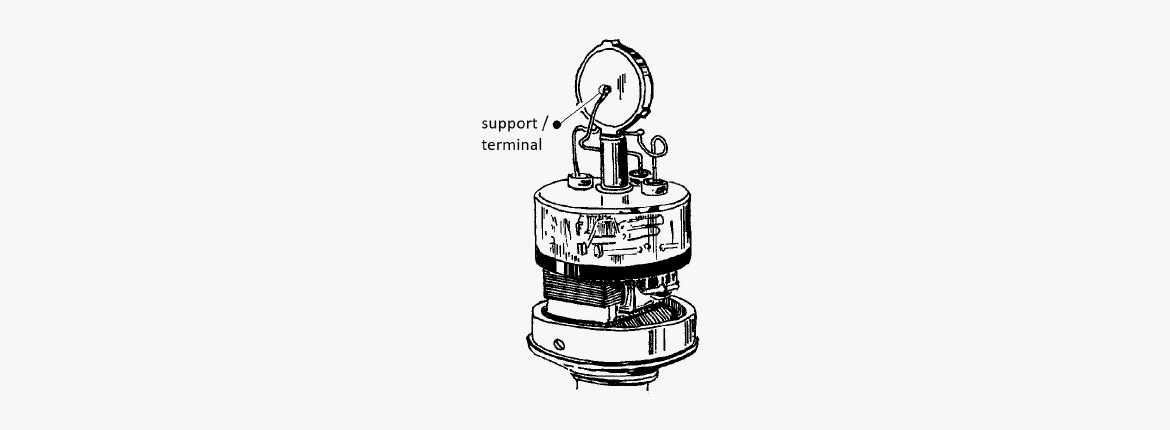
Rysunek 19. Mikrofon kondensatorowy z podwójną membraną.
W systemie mikrofonu kondensatorowego występuje również rezonans, ale jest on znacznie wyżej w zakresie częstotliwości niż ma to miejsce w przypadku mikrofonu dynamicznego. Tłumienie membrany zazwyczaj zachodzi dzięki powietrzu znajdującemu się między membraną a elektrodą stałą.
Ze względu na niską pojemność kondensatora mikrofonowego (~50 pF), system taki posiada bardzo wysoką impedancję. Dlatego konieczne jest umieszczenie stopnia wzmacniacza blisko systemu mikrofonowego, aby sygnał został dostosowany pod względem poziomu i impedancji do kabli i kolejnych wejść. Wynikowa impedancja wynosi zazwyczaj od 20 do 200 Ω.
Czułość mikrofonu kondensatorowego zależy od napięcia polaryzacji. Dlatego możliwe jest uzyskanie różnych charakterystyk kierunkowych poprzez kontrolowanie polaryzacji dwóch oddzielnych kapsuł lub dwóch membran umieszczonych po obu stronach wspólnej elektrody.
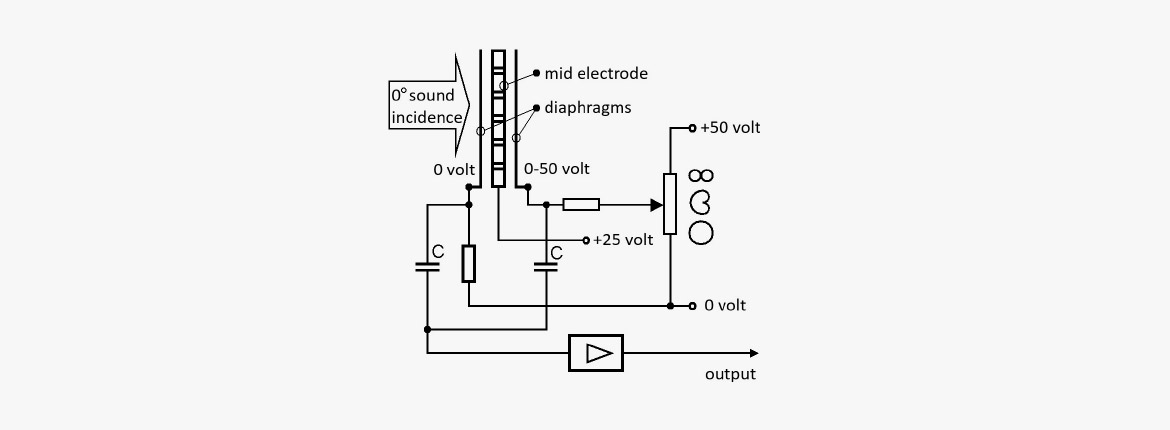
Rysunek 20. Schemat dla mikrofonu kondensatorowego z podwójną membraną i przełączalnymi charakterystykami kierunkowymi.
Rysunek 20 przedstawia, jak uzyskać trzy główne charakterystyki: sferyczną, kardioidalną i osiem figór. Wzory pomiędzy nimi są również możliwe:
Przednia membrana 0 V
Elektroda centralna 25 V
Tylna membrana 0 V
Obie membrany mają taki sam potencjał, 0 woltów, w stosunku do +25 woltów elektrody centralnej. Ta konfiguracja skutkuje dwiema charakterystykami kardioidalnymi, skierowanymi przeciwnie, ale w fazie. Poprzez elektryczne sumowanie obu sygnałów uzyskuje się charakterystyki kierunkowe sferyczne.
Przednia membrana 0 V
Elektroda centralna 25 V
Tylna membrana 25 V
Nie ma różnicy potencjałów między elektrodą centralną a tylną membraną, która będzie nieaktywna. Pozostaje charakterystyka kardioidalna przedniej membrany.
Przednia membrana 0 V
Elektroda centralna 25 V
Tylna membrana 50 V
Istnieje różnica napięć 25 woltów między obiema membranami a elektrodą centralną. Jednakże, ponieważ jedna jest ujemna, a druga pozytywna, sygnały dwóch układów mają przeciwną fazę, co skutkuje charakterystyką ósemkową.
Mikrofon kondensatorowy wysokich częstotliwości (HF)
Oprócz kondensatora mikrofonowego, mikrofon kondensatorowy wysokich częstotliwości zawiera oscylator o wysokiej częstotliwości i obwód demodulacyjny. W przeciwieństwie do mikrofonu kondensatorowego niskich częstotliwości (LF), nie jest stosowane napięcie polaryzacji na kondensatorze.
Z drugiej strony, zmienność pojemności spowodowana dźwiękiem moduluje wysoką częstotliwość oscylatora, która typowo może wynosić około 8 MHz.
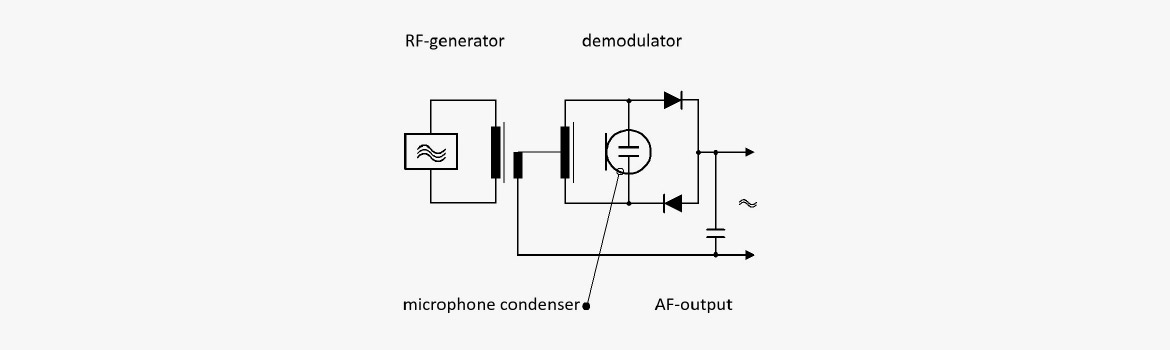
Rysunek 21. Zasada działania mikrofonu kondensatorowego RF.
Obwód demodulacyjny następnie wykrywa sygnał niskich częstotliwości (LF). Tylko kilka marek stosuje zasadę mikrofonu kondensatorowego wysokich częstotliwości (HF). Jednakże ma on pewne zalety, ponieważ jest stosunkowo niewrażliwy na wilgotność i uszkodzenia izolacji.
Mikrofon elektretowy
Mikrofon elektretowy działa w zasadzie jako mikrofon kondensatorowy niskich częstotliwości (LF). Jednak w przeciwieństwie do niego, mikrofon elektretowy nie musi stosować zewnętrznego napięcia między płytami kondensatora.
Mikrofon elektretowy zawiera materiały, które są uprzednio spolaryzowane elektrycznie, analogicznie do magnesu stałego. Materiały o tych właściwościach mogą być foliami plastikowymi (poliester, PVC, teflon) lub materiałami ceramicznymi elektretowymi. Spolaryzowanie następuje poprzez umieszczenie materiału w stanie podgrzanym i podczas kolejnego schładzania w polu elektrostatycznym, które dla folii wynosi około 20 kV / cm. Po usunięciu pola, materiał zachowa ładunek odpowiadający napięciu spolaryzowania, na przykład rzędu 100 V. Spolaryzowanie może także wystąpić nawet bez stosowania ciepła. Jeśli pole elektryczne jest wystarczająco silne, podgrzewanie może nie być konieczne.
Folie mogą działać jako membrana, a materiał ceramiczny elektrody może funkcjonować jako elektroda stała (mikrofony z elektrodą stałą).
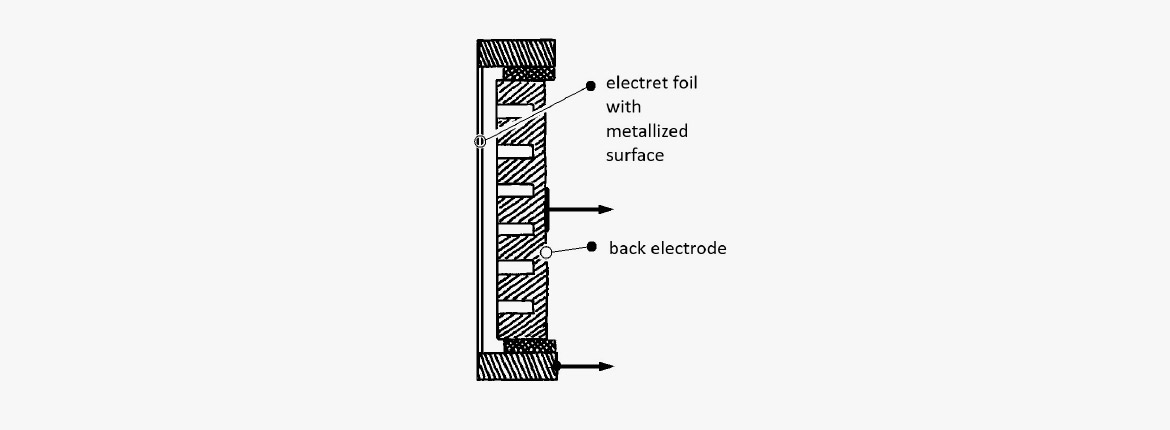
Rysunek 22. Zasada działania mikrofonu elektretowego.
Kiedy taki mikrofon nadal wymaga baterii lub innego zewnętrznego napięcia, jest to związane z wbudowanym wzmacniaczem (konwerter impedancji), który wymaga zasilania.
Materiały elektretowe stały się tak skuteczne w utrzymywaniu napięcia statycznego, że są one używane nawet w mikrofonach pomiarowych, gdzie istnieją duże wymagania co do stabilnej czułości.
Zasada
Istniejące mikrofony umieszczają przetwornik bezpośrednio po kapsule mikrofonowej, która jest typu kondensatorowego. Tłumik, który zapewnia tłumienie mikrofonu, zazwyczaj będzie się znajdować przed przetwornikiem. W mikrofonie kondensatorowym tłumik składa się z kondensatora wstawionego równolegle do kapsuły, przez co ładunek kapsuły jest zmniejszany wraz ze zmniejszeniem czułości.
Wbudowany przetwornik musi być w stanie obsłużyć całkowitą dynamikę mikrofonu. Dobre kapsuły mikrofonowe mogą mieć zakres dynamiczny od 125 do 140 dB, co stawia przynajmniej takie same wymagania co do przetwornika. W praktyce spotyka się rozwiązania, w których konieczne jest kaskadowe połączenie dwóch konwerterów w celu uzyskania wymaganej dynamiki.
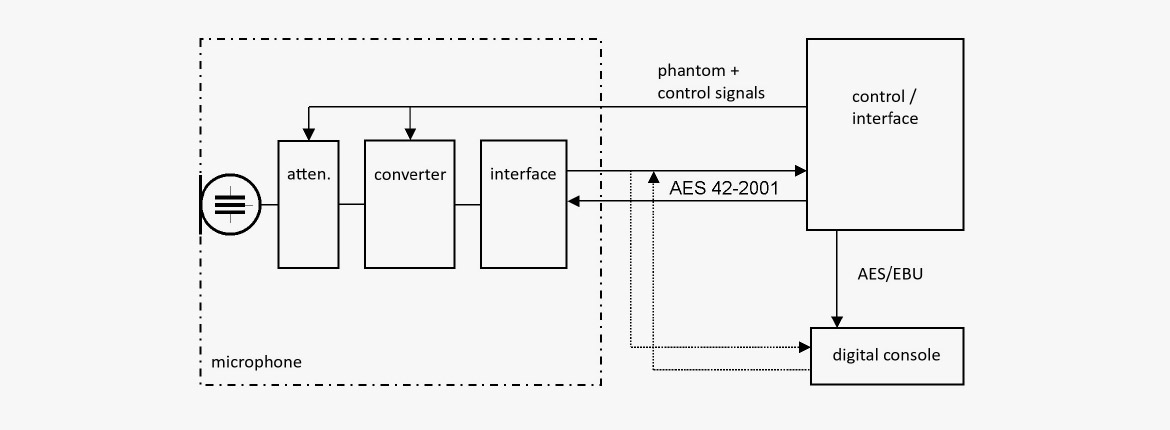
Rysunek 23. Zasada działania mikrofonu cyfrowego.